
Truk Sampah Berteknologi Canggih Demi Meningkatkan Kesehatan Masyarakat, Kebersihan Lingkungan Dan Keselamatan Bekerja
Writer : Ade Candra EN ER
Saat ini kendaraan tanpa awak banyak digunakan dalam berbagai bidang aktivitas manusia. Adalah sebuah harapan ada sebuah sistem teknologi yang bermanfaat bagi kesehatan masyarakat, kebersihan Lingkungan dan keselamatan bekerja. Belum lama ini ada sebuah peristiwa atau kecelakaan antara mobil truk pengangkut sampah dan sepeda motor, semoga tulisan ini mampu memberikan ulasan mengenai penggunaan kendaraan tak berawak untuk mengangkut sampah guna meningkatkan produktivitas tenaga kerja. Terjadinya sebuah kecelakaan bisa saja di akibatkan atas sebuah kesalahan manusia dan seperti apa yang menjadi pemberitaan beberapa kasus kecelakaan di sebabkan oleh pengemudi yang mengantuk atau ada faktor kelelahan sopir ketika mengemudi.
Penggunaan kendaraan tak berawak dalam pemindahan kargo menghindari kesalahan pengemudi yang disebabkan oleh kelelahan, jarak pandang terbatas, maka dari itu semoga sarana truk sampah berteknologi lebih mampu mencegah adanya faktor kelelahan pengemudi sehingga dapat bekerja dengan baik secara maksimal dan terhindar dari celaka. Produktifitas yang meningkat pada pekerjaan pengolahan sampah tentu di harapkan juga mampu lebih meningkatkan kebersihan lingkungan hingga semakin terwujudnya kesehatan masyarakat.
Lebih lanjut pada tulisan ini akan menjelaskan sarana teknis utama interaksi sistem kontrol truk sampah sampah otonom dengan operator.
Sarana teknis utama untuk interaksi sistem kontrol truk sampah otonom dengan operator adalah panel kontrol dan perangkat tampilan informasi. Dengan menggunakan panel kontrol, operator mengirimkan tindakan kontrol ke subsistem, mekanisme eksekutif, dan perangkat truk sampah otonom yang beroperasi dalam mode manual, semi-otomatis (otomatis) atau otomatis. Dalam mode semi-otomatis, perlu untuk memecahkan masalah pemisahan fungsi kontrol yang jelas antara operator dan perangkat kontrol. Perangkat tampilan informasi (monitor) memungkinkan operator untuk melihat status proses dan elemen, keberadaan keadaan darurat, hasil sistem diagnostik secara real time dan retrospektif. Dimungkinkan juga untuk menerapkan peringatan suara dan cahaya tambahan untuk operator, misalnya, untuk memberi sinyal keadaan darurat. Tugas sistem kontrol adalah menyediakan informasi yang diperlukan kepada operator.
Selain itu, untuk pengoperasian truk sampah otonom yang efektif bersama dengan mesin pertambangan lainnya, perlu untuk memecahkan masalah pengembangan model interaksi sistem kontrol truk sampah otonom dengan pusat kendali.
Mengingat kompleksitas dan beragamnya rumusan masalah yang dipecahkan saat mengemudikan dump truck otonom, serta dengan mempertimbangkan struktur kompleks konstruksi dump truck otonom, yang terdiri dari banyak sistem yang saling berhubungan, struktur umum sistem kontrol bertingkat untuk truk sampah otonom dikembangkan, yang disajikan pada Gambar.
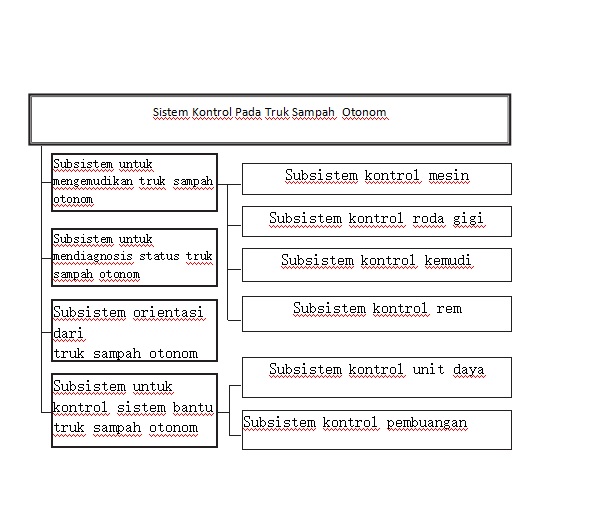
Gambar Struktur umum sistem kontrol truk sampah otonom
Sistem kontrol tingkat atas adalah sistem manajemen informasi yang menyelesaikan tugas koordinasi pekerjaan subsistem hilir, pertukaran informasi antar subsistem ini, serta interaksi sistem kontrol truk sampah otonom dengan operator dan pusat pengiriman, mendiagnosis status dan orientasi truk sampah otonom di luar angkasa. Tingkat menengah dari sistem kontrol diwakili oleh subsistem kontrol drive. Tingkat yang lebih rendah diwakili oleh subsistem kontrol penggerak sistem utama dan tambahan (mesin, motor roda gigi, sistem rem, sistem kemudi, perangkat pembuangan badan kapal, dll.).
Kesimpulan
Tugas yang disajikan dan struktur umum sistem kontrol memungkinkan kesimpulan bahwa tugas yang diselesaikan oleh sistem kontrol truk sampah otonom itu kompleks dan beragam. Namun, saat ini tidak ada pendekatan berbasis ilmiah untuk pengembangan, pemodelan matematika dan algoritma menggambar sistem kontrol untuk truk sampah otonom. Ini menghambat pembuatan truk penambangan otonom dengan karakteristik yang pada dasarnya baru. Oleh karena itu, studi yang ditujukan untuk memecahkan masalah ini relevan.
Untuk melanjutkan penelitian, perlu dilakukan hal-hal berikut:
Merumuskan persyaratan untuk sistem kontrol truk sampah otonom;
Menganalisis tugas yang diselesaikan oleh sistem kontrol truk sampah otonom;
Mengembangkan struktur, model matematika dan algoritma operasi dari subsistem yang dialokasikan dari sistem kontrol truk sampah otonom;
Mengembangkan persyaratan peralatan untuk sistem kontrol truk sampah otonom;
Membuat daftar peralatan yang diperlukan untuk memastikan kontrol otonom truk sampah;
Mengembangkan perangkat lunak yang memungkinkan simulasi interaksi subsistem sistem kontrol truk penambangan otonom satu sama lain;
Mengembangkan perangkat lunak yang memungkinkan simulasi interaksi subsistem kontrol truk sampah otonom dengan sistem Smart Quarry.

Demikian tulisan ini semoga menjadi ide atau saran kepada pihak yang lebih berkepentingan atau ahli terhadap pengelolahan sampah di wilayah Kabupaten Bogor.
Referensi
https://vistgroup.ru/media/news/nid/vist-group-and-suek-are-unmanned-belaz- on-mine-in-khakassia/
Tidak ada komentar:
Posting Komentar